Hello, I’m not sure I fully understand what you would like to do. In the end of reconstruction you get a mesh. It’s not possible to convert it back to individual frames, if that’s what you mean
I would like to convert ‘point cloud.ply’ made with the existing 3D camera into a RecFusion sequence file using ‘recfusion sdk’. I would like to reconstruct using the sequence file I made. I want to know how to do it in detail.
It’s not possible to convert a ply into a RecFusion sequence. You can only go in the other direction: record a sequence and reconstruct a mesh from it. Check ConsoleReconstruction sample to see how this can be done
It is not possible to do the recontruction from point clouds, only from sequences. Please follow the section " Sequences and Offline Reconstruction" in our user guide (User Guide | RecFusion - 3d Reconstruction Software) to see how the sequences can be recorded. After that, you can import the sequence and perform the reconstruction the same way you would do it live.
This answer is from a different context. In that case there is one point cloud per frame, not a single point cloud with the reconstruction result. What you need to do there is to convert the point cloud to a depth and color image given the camera intrinsics. There is no specific function for this in the SDK, but it’s a straightforward application of the pinhole projection model.
I extracted the depth image and color image from the point cloud of the 3d camera. I would like to use this to do reconstruction using ‘realSenseReconstruction’ sample.
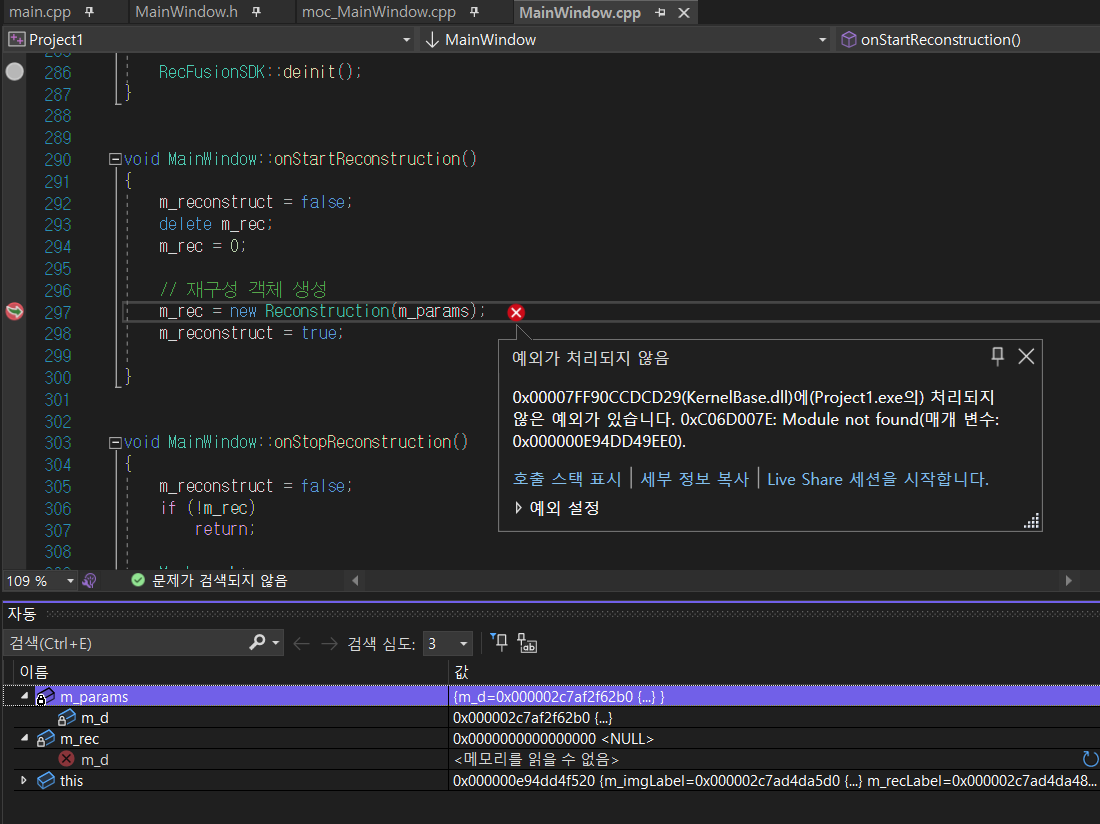
The image appears to have been entered well in the QT window, but Reconfiguration object is not created.
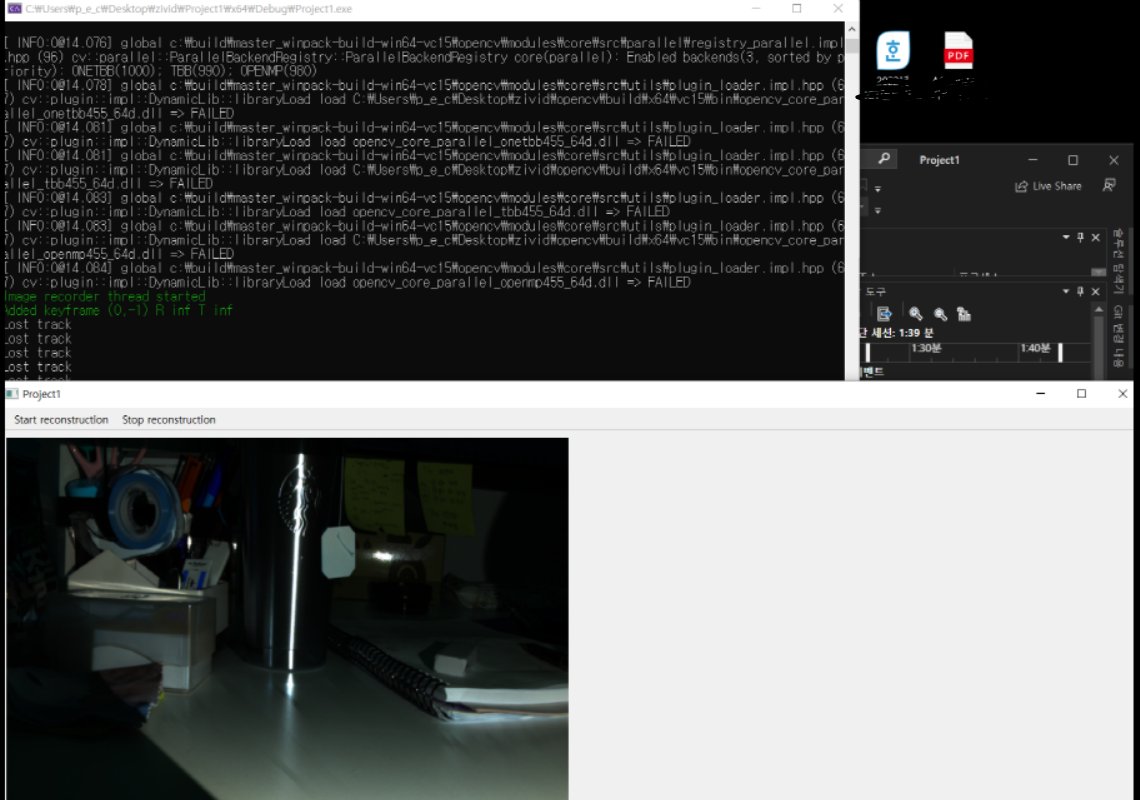
I Don’t think that this is some problem with the code. Can you please check that the Visual Studio loads the dlls from the bin folder of the RecFusion SDK and not the dlls that are on your computer and might have a mismatching versions to those from SDK? Also do you experience the same issue when trying to run one of our samples?