Currently, we are registering an US sweep (has pose) with a CT volume (has pose) to create a fused volume. We then apply Volume Reslicing to the fused volume. The output generated is a shared image set with no information on the pose(position + orientation). However, I would like to know whether there is any way to access the pose of each slice/image of the shared image set?
The output of the VolumeReslicingAlgorithm for sure comes with pose information:
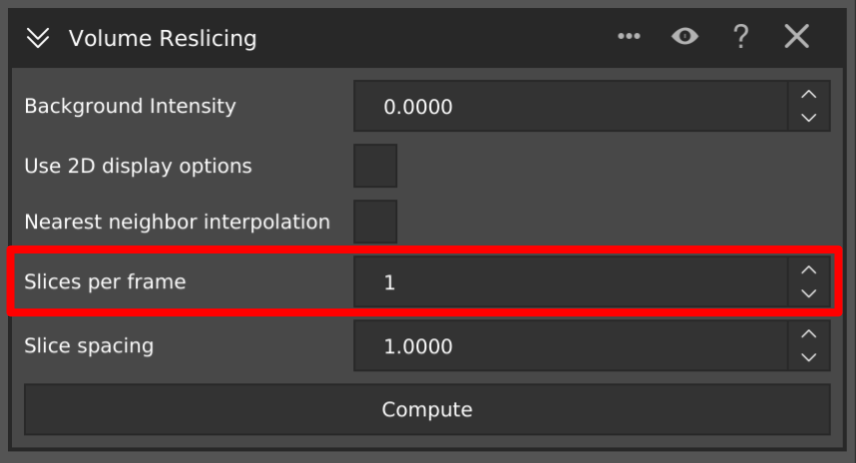
- If you don’t want to compute slabs (number of slices per frame = 1), the input ultrasound sweep is cloned and populated with the resliced content of the algorithm’s other input. In that case you get a data structure that behaves exactly as a ultrasound sweep.
- If you set the number of slices to something >1, you get a 4D sequence in the form of a normal shared image set containing multiple 3D volumes. Each of these volumes also comes with a matrix, just like the input volume.
In any case, the result is correctly aligned in world space.
Best,
Oliver
How do we know what to set the no. of slices per frame as? Additionally, how is it possible to extract the output from the Volume Reslicing algorithm as sweep and slab volume?
And how to we set the no. of slices per frame?