Hi, I’m using a demo version of your software with a single Azure Kinect. It works well with clean results if set up correctly. After a few more tests I hope to purchase the full version.
My question is, is it possible to export a point cloud format or is this planned?
I also use the popular Agisoft Metashape other photogrammetry software and CAD packages. These offer really good texturing capabilities which are difficult to match on a ‘live’ scan. They can also manipulate point clouds well and use them as a base for texturing and producing a mesh. Having access to the raw point cloud data would greatly improve the options for workflows.
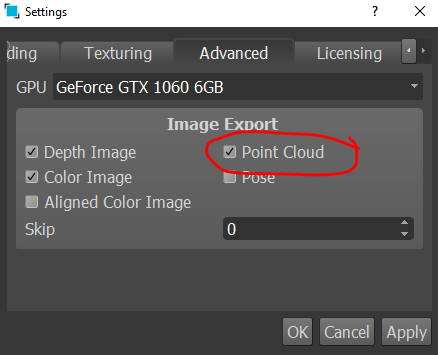
currently you can already export point clouds from individual frames during reconstruction. To enable export, you first need to enable it in settings
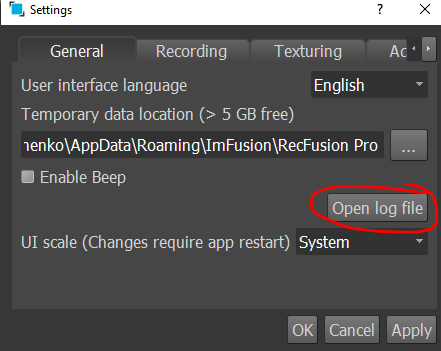
then press “Ctrl+E”. This will enable export of the data into the folder C:\Users\<user>\AppData\Roaming\ImFusion\RecFusion Pro\<date>. You can find the exact folder path in the log file
Search there for a message “Exporting images to folder …”
The export of the final point cloud is currently not available but we do plan to add it to our next release.
Thank you Olga for the quick response. That’s really helpful.
Also I’m pleased to hear that full point clouds will be coming soon! So glad to see your software is being continually developed. It really builds confidence in the product. I look forward to purchase the full version soon!
Just adding my voice to this. I just bought the L515 and need point cloud output (e.g. pts would be great).
For me the most important data is a coloured point cloud for camera tracking in a VFX workflow, the meshing part is actually secondary in my use case and often not required at all.
Is there an ETA for this feature? I’d hit the buy button immedateily
So, now that I conceded and installed windows 10 I finally get to play with this.
I am mostly after recording coloured point clouds and will often not need the mesh resoncstrustion at all.
I assume that most of the processing that happens when I hit “Start reconstruction” is spent on meshing?
Is there a way to bypass this and go straight to point cloud only processing?
most of the computation while reconstruction, is spent on an algorithm for visual tracking and frame integration into the reconstruction volume. The underlying algorithm does neither use a pointcloud nor a mesh for representing the reconstruction result, while tracking. The mesh is built after the scanning procedure, when the “Stop reconstruction”, was hit. So there is no way to safe a lot of computation by bypassing the meshing.