I tried to debug with Astra s, but I found that when I connected the camera, my color interface and depth interface were deformed in the recfusion program.
In addition, Astra s has great interference. Please tell me how to solve this problem in the reconstruction scheme of multiple devices and how I should develop it.
Because of the interference, I can’t rebuild directly, so what should I do
Hello,
you can try enabling interference minimization
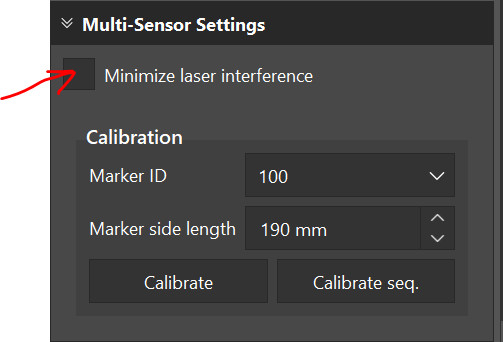
This will turn only laser of one camera at a time and keep the lasers of all the other sensors off.
Best regards,
Olga
This does not work, because after I turn on this function, the FPS is only 1.
The drop in fps is expected since we are toggling the laser on and off. You can record a sequence and then try reconstructing it offline. If this is not an option for you and you want to use a multisensor setup, you should consider changing your sensors from Orbbec to others which do not have an interference issue (for example Intel RealSense D415)
Which of realsense d415 and realsense d435 is more suitable for human reconstruction? Can d415 meet the requirements?
D415 is better due to higher accuracy
Finally, I try to debug according to the example code, and the calibration function in the code cannot be used.
#include “MainWindow.h”
#include <QtCore/QCoreApplication>
#include <QtCore/QElapsedTimer>
#include <QtCore/QMutex>
#include <QtCore/QTimer>
#include <QtWidgets/QAction>
#include <QtWidgets/QDialog>
#include <QtWidgets/QFileDialog>
#include <QtWidgets/QGridLayout>
#include <QtWidgets/QInputDialog>
#include <QtWidgets/QLabel>
#include <QtWidgets/QMessageBox>
#include <QtWidgets/QPushButton>
#include <QtWidgets/QToolBar>
#include
#include
#include
#include
using namespace RecFusion;
MainWindow::MainWindow()
: m_timer(0)
, m_calibMessageBox(0)
, m_reconstruct(false)
, m_calibrate(false)
, m_rec(0)
, m_sensorManager(0)
{
// Output RecFusion SDK version
std::cout << "Using RecFusionSDK " << RecFusionSDK::majorVersion() << “.” << RecFusionSDK::minorVersion() << “.” << RecFusionSDK::buildVersion()
<< std::endl;
// Activate license
bool ok = RecFusionSDK::activate("XXXXX-XXXXX-XXXXX-XXXXX-XXXXX");
if (!ok)
std::cout << "Invalid RecFusion license. Export will be disabled." << std::endl;
RecFusionSDK::init();
// Find available sensors
m_sensorManager = new SensorManager;
int numSensors = m_sensorManager->deviceCount();
std::cout << "Found " << numSensors << " sensors" << std::endl;
if (numSensors < 1)
{
QMessageBox::warning(this, "Initialization", "This sample requires at least two sensors to be connected. Exiting.");
QTimer::singleShot(0, this, SLOT(close()));
return;
}
// Create main window GUI
QGridLayout* l = new QGridLayout;
for (int i = 0; i < numSensors; i++)
{
m_imgLabel.push_back(new QLabel);
m_recLabel.push_back(new QLabel);
l->addWidget(m_imgLabel[i], 0, i);
l->addWidget(m_recLabel[i], 1, i);
}
QWidget* wt = new QWidget;
wt->setLayout(l);
setCentralWidget(wt);
resize(1024, 768);
// Resize all containers and initialize pointers to zero, and
m_colorImg.resize(numSensors, 0);
m_depthImg.resize(numSensors, 0);
m_sceneImg.resize(numSensors, 0);
m_calibImgColor.resize(numSensors, 0);
m_calibImgDepth.resize(numSensors, 0);
m_calibImgValid.resize(numSensors, false);
m_sensor.resize(numSensors, 0);
m_K.resize(numSensors);
m_colorK.resize(numSensors);
m_depthToColorT.resize(numSensors);
m_sensorT.resize(numSensors);
// Instantiate sensor objects
for (int i = 0; i < numSensors; i++)
m_sensor[i] = m_sensorManager->sensor(i);
// Open sensors
for (int i = 0; i < numSensors; i++)
{
ok = m_sensor[i]->open();
if (!ok)
{
QMessageBox::warning(this, "Initialization", "Couldn't open sensor #" + QString::number(i + 1) + ". Exiting.");
QTimer::singleShot(0, this, SLOT(close()));
}
else
{
// Get sensor properties
int cw = m_sensor[i]->colorWidth();
int ch = m_sensor[i]->colorHeight();
int dw = m_sensor[i]->depthWidth();
int dh = m_sensor[i]->depthHeight();
m_K[i] = m_sensor[i]->depthIntrinsics();
// m_colorK[i] = m_sensor[i]->colorIntrinsics(); //type
m_depthToColorT[i] = m_sensor[i]->depthToColorTransformation();
// Create color and depth images
m_colorImg[i] = new ColorImage(cw, ch);
m_depthImg[i] = new DepthImage(dw, dh);
m_sceneImg[i] = new ColorImage(dw, dh, 4);
m_calibImgColor[i] = new ColorImage(cw, ch);
m_calibImgDepth[i] = new DepthImage(dw, dh);
m_imgLabel[i]->resize(cw, ch);
}
}
// Set sensor transformation to identity
for (int r = 0; r < 4; ++r)
{
for (int c = 0; c < 4; ++c)
{
for (int i = 0; i < numSensors; i++)
m_sensorT[i](r, c) = (r == c) ? 1 : 0;
}
}
// Create message box for calibration dialog
m_calibMessageBox = new QMessageBox(this);
m_calibMessageBox->setIcon(QMessageBox::Information);
m_calibMessageBox->setWindowTitle("Calibration");
m_calibMessageBox->setText("Press OK to capture calibration frame");
m_calibMessageBox->setDefaultButton(QMessageBox::Ok);
std::cout << "after click ok........................." << std::endl;
connect(m_calibMessageBox, SIGNAL(accepted()), this, SLOT(performCalibration()));
std::cout << "after accepted........................." << std::endl;
QToolBar* toolbar = new QToolBar(this);
addToolBar(toolbar);
// Create actions for calibrating and reconstructing
QAction* a;
a = new QAction("Calibrate", this);
a->setShortcut(QKeySequence("F9"));
connect(a, SIGNAL(triggered()), this, SLOT(calibrate()));
addAction(a);
toolbar->addAction(a);
a = new QAction("Save Calibration", this);
a->setShortcut(QKeySequence("F10"));
connect(a, SIGNAL(triggered()), this, SLOT(saveCalibration()));
addAction(a);
toolbar->addAction(a);
a = new QAction("Load calibration", this);
a->setShortcut(QKeySequence("F11"));
connect(a, SIGNAL(triggered()), this, SLOT(loadCalibration()));
addAction(a);
toolbar->addAction(a);
a = new QAction("Start Reconstruction", this);
a->setShortcut(QKeySequence("F5"));
connect(a, SIGNAL(triggered()), this, SLOT(startReconstruction()));
addAction(a);
toolbar->addAction(a);
a = new QAction("Stop Reconstruction", this);
a->setShortcut(QKeySequence("F6"));
connect(a, SIGNAL(triggered()), this, SLOT(stopReconstruction()));
addAction(a);
toolbar->addAction(a);
m_timer = new QTimer(this);
connect(m_timer, SIGNAL(timeout()), this, SLOT(processFrames()));
m_timer->start(50);
}
MainWindow::~MainWindow()
{
int numSensors = (int)m_sensor.size();
for (int i = 0; i < numSensors; i++)
{
// Close sensors
m_sensor[i]->close();
// Delete all allocated data
delete m_colorImg[i];
delete m_depthImg[i];
delete m_sceneImg[i];
delete m_calibImgColor[i];
delete m_calibImgDepth[i];
}
delete m_sensorManager;
delete m_timer;
delete m_rec;
RecFusionSDK::deinit();
}
void MainWindow::calibrate()
{
// Show message box to let user choose correct frame before starting calibration
m_calibrate = false;
m_calibMessageBox->setText("Press OK to capture calibration frames.");
m_calibMessageBox->show();
}
void MainWindow::performCalibration()
{
std::cout << “in performCalibration…” << std::endl;
int numSensors = (int)m_sensor.size();
int numSensorPairs = numSensors - 1;
// Set sensor transformation to identity
for (int r = 0; r < 4; ++r)
{
for (int c = 0; c < 4; ++c)
{
for (int i = 0; i < numSensors; i++)
m_sensorT[i](r, c) = (r == c) ? 1 : 0;
}
}
bool okForAll = true;
std::vector<RecFusion::Mat4> T(numSensorPairs);
for (int sp = 0; sp < numSensorPairs; ++sp)
{
QMessageBox::information(
this, tr("Calibration"), tr("Show the calibration marker to sensors %1 and %2, then press OK").arg(sp + 1).arg(sp + 2));
// Create calibration object for two sensors
Calibration calib;
calib.init(2);
// Single-sided calibration
calib.setMarker(300, 380);
bool ok = false;
// Try to run calibration until it succeeds but at most 10 times
for (int i = 0; i < 10; ++i)
{
// Reset valid flag for capturing calibration images
m_calibImgValid[sp] = m_calibImgValid[sp + 1] = false;
// Setting m_calibrate to true, instructs the capture loop to capture calibration images
m_calibrate = true;
// Wait until calibration images for both sensors have been captured
while (!m_calibImgValid[sp] && !m_calibImgValid[sp + 1])
QCoreApplication::processEvents();
// Stop calibration frame capturing
m_calibrate = false;
// Pass captured images to calibration
calib.setImage(0, *m_calibImgDepth[sp + 0], *m_calibImgColor[sp + 0], m_K[sp + 0], m_colorK[sp + 0], &m_depthToColorT[sp + 0]);
calib.setImage(1, *m_calibImgDepth[sp + 1], *m_calibImgColor[sp + 1], m_K[sp + 1], m_colorK[sp + 1], &m_depthToColorT[sp + 1]);
// Run calibration
ok = calib.calibrate();
if (ok)
break;
}
if (ok)
{
// Retrieve sensor transformation if calibration succeeded
calib.getTransformation(1, T[sp]);
QMessageBox::information(
this, "Calibration", "Calibration between sensors " + QString::number(sp + 1) + " and " + QString::number(sp + 2) + " succeeded");
}
else
{
QMessageBox::information(
this, "Calibration", "Calibration between sensors " + QString::number(sp + 1) + " and " + QString::number(sp + 2) + " failed");
}
okForAll &= ok;
if (!okForAll)
break;
}
if (okForAll)
{
for (int sp = 0; sp < numSensorPairs; sp++)
m_sensorT[sp + 1] = m_sensorT[sp] * T[sp];
QMessageBox::information(this, "Calibration", "Calibration succeeded");
}
else
{
QMessageBox::information(this, "Calibration", "Calibration failed");
}
}
void MainWindow::saveCalibration()
{
QString filename = QFileDialog::getSaveFileName(this, “Save calibration”);
if (filename.isEmpty())
return;
// Save calibrations to file as 4x4 matrices in row-major order
std::ofstream out(filename.toStdString());
for (int i = 0; i < m_sensorT.size(); ++i)
{
for (int r = 0; r < 4; ++r)
{
for (int c = 0; c < 4; ++c)
out << m_sensorT[i](r, c) << " ";
out << std::endl;
}
}
out.close();
}
void MainWindow::loadCalibration()
{
QString filename = QFileDialog::getOpenFileName(this, “Load calibration”);
if (filename.isEmpty())
return;
std::ifstream in(filename.toStdString());
if (!in.is_open() || !in.good())
{
QMessageBox::information(this, “Load calibration”, “Couldn’t open calibration file”);
return;
}
// Load calibration from file
std::vector<RecFusion::Mat4> tmp(m_sensor.size());
for (int i = 0; i < m_sensor.size(); ++i)
{
for (int r = 0; r < 4; ++r)
for (int c = 0; c < 4; ++c)
in >> tmp[i](r, c);
}
if (in.fail())
{
QMessageBox::information(this, "Load calibration", "Error reading calibration file");
return;
}
in.close();
m_sensorT = tmp;
}
void MainWindow::startReconstruction()
{
m_reconstruct = false;
// Delete reconstruction object if there is one
delete m_rec;
m_rec = 0;
// Set reconstruction parameters for sensors
ReconstructionParams params((int)m_sensor.size());
// Set per-sensor parameters
for (int i = 0; i < m_sensor.size(); ++i)
{
params.setImageSize(m_colorImg[i]->width(), m_colorImg[i]->height(), m_depthImg[i]->width(), m_depthImg[i]->height(), i);
params.setIntrinsics(m_K[i], i);
params.setColorIntrinsics(m_colorK[i], i);
params.setDepthToColorTransformation(m_depthToColorT[i], i);
}
// Set volume parameters
params.setVolumePosition(Vec3(0, -30, 1500));
params.setVolumeResolution(Vec3i(360, 512, 360));
params.setVolumeSize(Vec3(1500, 2000, 1600));
// Create reconstruction object
m_rec = new Reconstruction(params);
// Start reconstruction
m_reconstruct = true;
}
void MainWindow::stopReconstruction()
{
// Stop reconstruction
m_reconstruct = false;
if (!m_rec)
return;
// Get reconstructed mesh
Mesh mesh;
bool ok = m_rec->getMesh(&mesh);
// Delete reconstruction object
delete m_rec;
m_rec = 0;
if (!ok)
{
std::cout << "Couldn't retrieve mesh" << std::endl;
return;
}
std::cout << "Reconstructed mesh (" << mesh.vertexCount() << " vertices, " << mesh.triangleCount() << " triangles)" << std::endl;
// Save mesh to file
ok = mesh.save("mesh.ply", Mesh::PLY);
if (ok)
std::cout << "Saved mesh as PLY (" << mesh.vertexCount() << " vertices, " << mesh.triangleCount() << " triangles)" << std::endl;
#ifndef _DEBUG
// Show mesh in viewer
MeshViewer viewer;
viewer.showMesh(&mesh);
#endif
}
void MainWindow::processFrames()
{
for (int i = 0; i < m_sensor.size(); i++)
{
if (!m_depthImg[i] || !m_colorImg[i])
return;
}
// Grab images from sensor
std::vector<bool> ok(m_sensor.size());
for (int i = 0; i < m_sensor.size(); i++)
ok[i] = m_sensor[i]->readImage(*m_depthImg[i], *m_colorImg[i], 40);
// Process images
for (int i = 0; i < m_sensor.size(); ++i)
{
if (!ok[i])
continue;
// Get image size
int cw = m_colorImg[i]->width();
int ch = m_colorImg[i]->height();
int dw = m_depthImg[i]->width();
int dh = m_depthImg[i]->height();
if (m_reconstruct && m_rec)
{
// Add frame to reconstruction
bool status;
bool ret = m_rec->addFrame(i, *m_depthImg[i], *m_colorImg[i], &status, m_sceneImg[i], 0, &m_sensorT[i]);
if (ret && status)
{
// Display rendering of current reconstruction when tracking succeeded
QImage image(m_sceneImg[i]->data(), dw, dh, QImage::Format_RGBA8888);
m_recLabel[i]->setPixmap(QPixmap::fromImage(image).scaled(dw, dh, Qt::IgnoreAspectRatio, Qt::SmoothTransformation));
}
}
else if (m_calibrate)
{
// Save calibration frame
memcpy(m_calibImgColor[i]->data(), m_colorImg[i]->data(), cw * ch * 3);
memcpy(m_calibImgDepth[i]->data(), m_depthImg[i]->data(), dw * dh * sizeof(float));
m_calibImgValid[i] = true;
}
// Display captured images in GUI
QImage image(m_colorImg[i]->data(), cw, ch, QImage::Format_RGB888);
m_imgLabel[i]->setPixmap(QPixmap::fromImage(image).scaled(cw, ch, Qt::IgnoreAspectRatio, Qt::SmoothTransformation));
}
// Update GUI
update();
}
What exactly doesn’t work?
Would you please check whether my code is correct first? The calibration doesn’t work. All my cameras can see the chessboard. I tested it normally in the fusion pro, but the calibration in this code can’t be calibrated normally.
Please try to perform the calibration from the MultiViewReconstruction sample. If the calibration there works, check what is different there from your code.
OK, I see.
In addition, I want to know if it supports Microcomputer? For example, development board, industrial computer.
What are the minimum requirements of SDK for hardware.
OK, thank you very much for your answer.
We have started to promote it, and there will be large orders in the later stage.
During the testing of our products, there is a problem.
When people stand on the turntable and hold the handle, how to solve the reconstruction of the handle?
Each time the reconstruction is rotated, the handle will also be collected. I don’t know how to solve this problem.Can SDK parameter settings solve this problem? Or can the material of the handle solve this problem?
OK, thank you very much for your answer.
We have started to promote it, and there will be large orders in the later stage.
During the testing of our products, there is a problem.
When people stand on the turntable and hold the handle, how to solve the reconstruction of the handle?
Each time the reconstruction is rotated, the handle will also be collected. I don’t know how to solve this problem.Can SDK parameter settings solve this problem? Or can the material of the handle solve this problem?
You can remove the handle in the post-processing step. Just define a bounding box and use Mesh::crop function to crop away the handle
Define a border? Are you talking about defining a volume range? In addition, use the function to cut off the handle? Can you tell me which function it is?
Take a look at Mesh::crop function
bool crop ( const Vec3 & boxCenter,
const Vec3 & boxExtent,
const bool discardPointsInside = false
)
Crop mesh with given bounding box.
Parameters
boxCenter Center of mesh bounding box in mesh coordinate system
boxExtent Extent of mesh bounding box along mesh X, Y and Z axis
discardPointsInside If set to true, points inside of the bounding box will be discarded
Returns
True if successful, false otherwise.
Is this the function? If so, I’ll give it a try.
Yes, this is the function
I found a problem. I use the SDK for development, but I find that I need to calibrate every time I debug. How can I use the calibration function to output the matrix file and save the output? For example, output TXT after calibration, and then load TXT matrix each time? I didn’t see these documents.
@gavranovic