Hello,
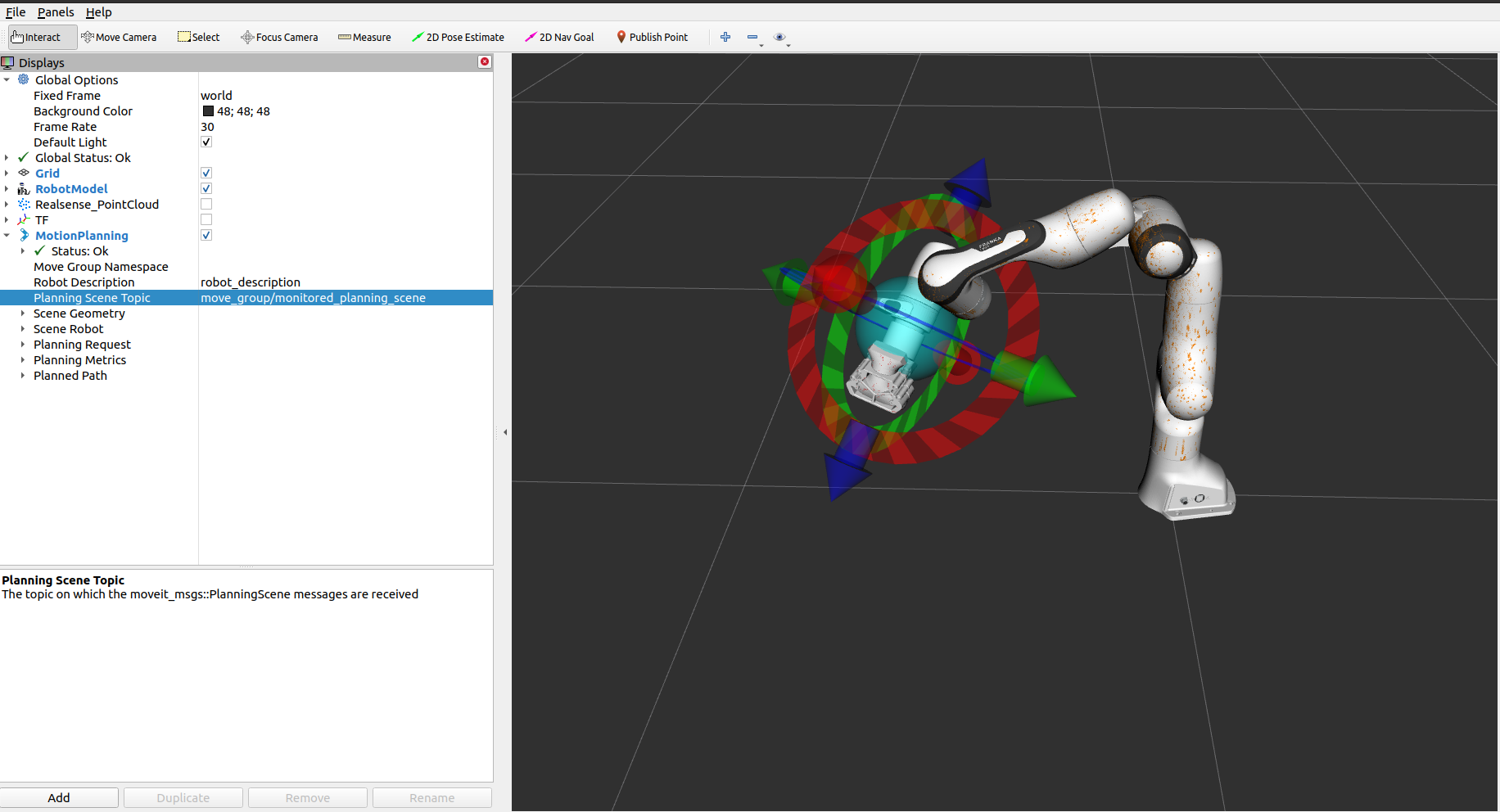
we have a Franka Panda robot to which I am trying to connect. MoveIt is running, and I am visualizing it through RVIZ. Planning/execution in RVIZ works fine.
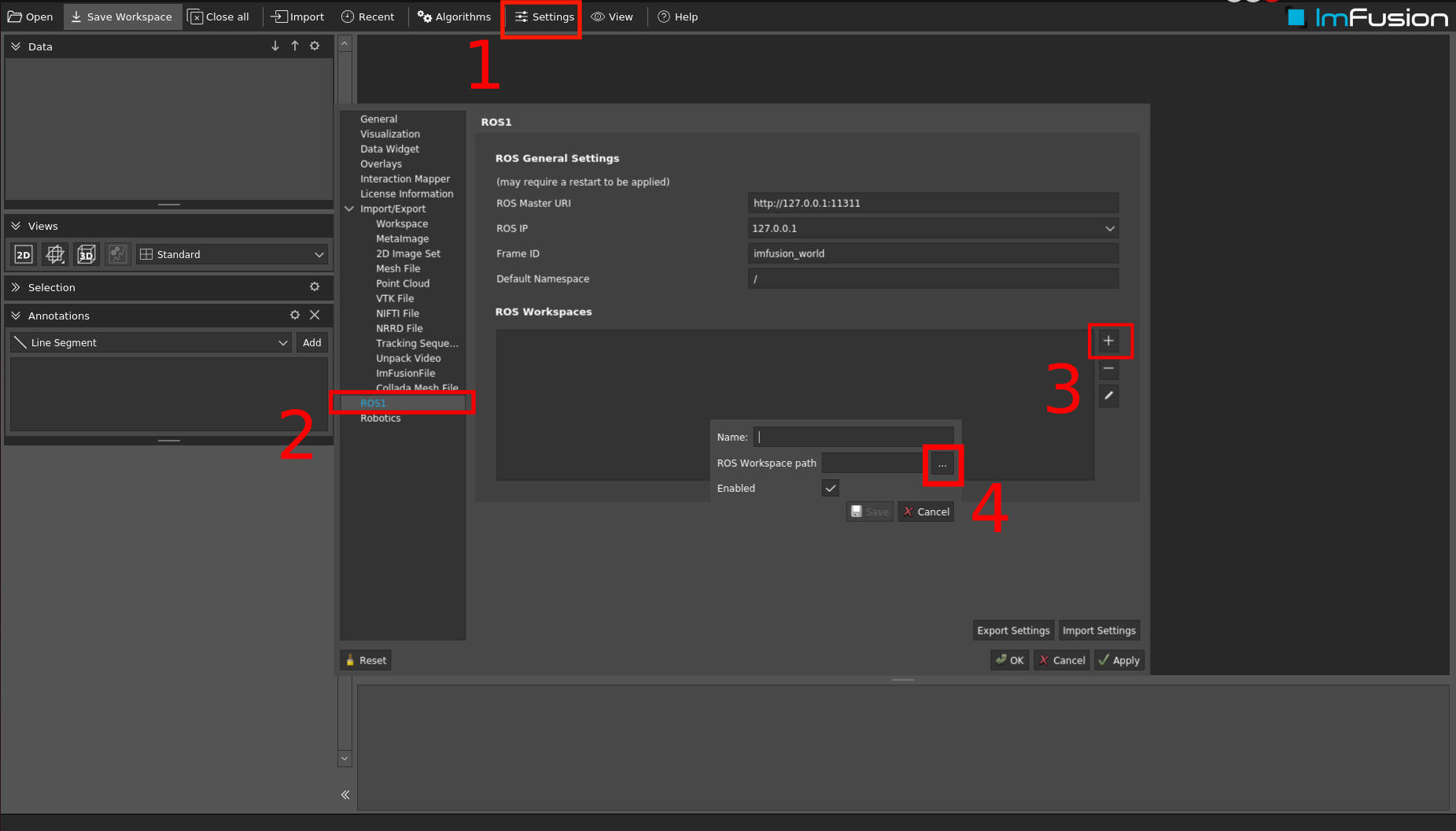
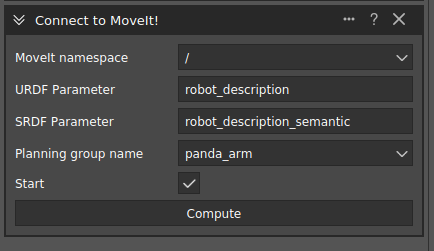
When I start ImFusion and try the same with the provided algorithm, ImFusion crashes:
[Core.Platform] ***** Encountered fatal exception: SIGSEGV - Segmentation violation signal, PID 9997 *****
stack dump [1] /lib/x86_64-linux-gnu/libc.so.6+0x43090 [0x7f4a80ab4090]
stack dump [2] /usr/lib/ImFusionLib/plugins/libImFusionRobotics.so : ImFusion::Robotics::RobotModel::RobotModel(ImFusion::Filesystem::Path const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, ImFusion::Robotics::RobotModel::NotableFrames const&)+0x2272 [0x7f49fca1b672]
stack dump [3] /usr/lib/ImFusionLib/plugins/libImFusionRobotics.so : ImFusion::Robotics::RobotModel::loadFromBuffers(ImFusion::Filesystem::Path const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, ImFusion::Robotics::RobotModel::NotableFrames const&)+0xe [0x7f49fca1c25e]
stack dump [4] /usr/lib/ImFusionLib/plugins/libImFusionROS.so : ImFusion::ROS::MoveItControlStream::loadFromParameterServer(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&)+0x312 [0x7f49fda425c2]
stack dump [5] /usr/lib/ImFusionLib/plugins/libImFusionROS.so : ImFusion::ROS::CreateMoveItControlStreamAlgorithm::compute()+0x37e [0x7f49fda5ba4e]
stack dump [6] /usr/lib/ImFusionLib/plugins/libImFusionROS.so : ImFusion::ROS::CreateMoveItControlStreamController::onCompute()+0xa8 [0x7f49fda5ea78]
stack dump [7] /lib/x86_64-linux-gnu/libQt5Core.so.5 : QMetaObject::activate(QObject*, int, int, void**)+0x7d0 [0x7f4a811121d0]
stack dump [8] /lib/x86_64-linux-gnu/libQt5Widgets.so.5 : QAbstractButton::clicked(bool)+0x46 [0x7f4a81bf3806]
stack dump [9] /lib/x86_64-linux-gnu/libQt5Widgets.so.5+0x25fa2e [0x7f4a81bf3a2e]
stack dump [10] /lib/x86_64-linux-gnu/libQt5Widgets.so.5+0x260e73 [0x7f4a81bf4e73]
stack dump [11] /lib/x86_64-linux-gnu/libQt5Widgets.so.5 : QAbstractButton::mouseReleaseEvent(QMouseEvent*)+0xe5 [0x7f4a81bf5035]
stack dump [12] /lib/x86_64-linux-gnu/libQt5Widgets.so.5 : QWidget::event(QEvent*)+0x286 [0x7f4a81b412b6]
stack dump [13] /lib/x86_64-linux-gnu/libQt5Widgets.so.5 : QApplicationPrivate::notify_helper(QObject*, QEvent*)+0x86 [0x7f4a81afea66]
stack dump [14] /lib/x86_64-linux-gnu/libQt5Widgets.so.5 : QApplication::notify(QObject*, QEvent*)+0x583 [0x7f4a81b08343]
stack dump [15] /lib/x86_64-linux-gnu/libQt5Core.so.5 : QCoreApplication::notifyInternal2(QObject*, QEvent*)+0x18a [0x7f4a810e680a]
stack dump [16] /lib/x86_64-linux-gnu/libQt5Widgets.so.5 : QApplicationPrivate::sendMouseEvent(QWidget*, QMouseEvent*, QWidget*, QWidget*, QWidget**, QPointer<QWidget>&, bool, bool)+0x1b7 [0x7f4a81b07457]
stack dump [17] /lib/x86_64-linux-gnu/libQt5Widgets.so.5+0x1c935d [0x7f4a81b5d35d]
stack dump [18] /lib/x86_64-linux-gnu/libQt5Widgets.so.5+0x1cc1ec [0x7f4a81b601ec]
stack dump [19] /lib/x86_64-linux-gnu/libQt5Widgets.so.5 : QApplicationPrivate::notify_helper(QObject*, QEvent*)+0x86 [0x7f4a81afea66]
stack dump [20] /lib/x86_64-linux-gnu/libQt5Widgets.so.5 : QApplication::notify(QObject*, QEvent*)+0x330 [0x7f4a81b080f0]
stack dump [21] /lib/x86_64-linux-gnu/libQt5Core.so.5 : QCoreApplication::notifyInternal2(QObject*, QEvent*)+0x18a [0x7f4a810e680a]
stack dump [22] /lib/x86_64-linux-gnu/libQt5Gui.so.5 : QGuiApplicationPrivate::processMouseEvent(QWindowSystemInterfacePrivate::MouseEvent*)+0x6e3 [0x7f4a814cf7d3]
stack dump [23] /lib/x86_64-linux-gnu/libQt5Gui.so.5 : QGuiApplicationPrivate::processWindowSystemEvent(QWindowSystemInterfacePrivate::WindowSystemEvent*)+0x25b [0x7f4a814d110b]
stack dump [24] /lib/x86_64-linux-gnu/libQt5Gui.so.5 : QWindowSystemInterface::sendWindowSystemEvents(QFlags<QEventLoop::ProcessEventsFlag>)+0xbb [0x7f4a814ab35b]
stack dump [25] /lib/x86_64-linux-gnu/libQt5XcbQpa.so.5+0x7932e [0x7f4a7305a32e]
stack dump [26] /lib/x86_64-linux-gnu/libglib-2.0.so.0g_main_context_dispatch+0x27d [0x7f4a7bd2517d]
stack dump [27] /lib/x86_64-linux-gnu/libglib-2.0.so.0+0x52400 [0x7f4a7bd25400]
stack dump [28] /lib/x86_64-linux-gnu/libglib-2.0.so.0g_main_context_iteration+0x33 [0x7f4a7bd254a3]
stack dump [29] /lib/x86_64-linux-gnu/libQt5Core.so.5 : QEventDispatcherGlib::processEvents(QFlags<QEventLoop::ProcessEventsFlag>)+0x65 [0x7f4a8113e435]
stack dump [30] /lib/x86_64-linux-gnu/libQt5Core.so.5 : QEventLoop::exec(QFlags<QEventLoop::ProcessEventsFlag>)+0x12b [0x7f4a810e53ab]
stack dump [31] /lib/x86_64-linux-gnu/libQt5Core.so.5 : QCoreApplication::exec()+0x96 [0x7f4a810ed116]
stack dump [32] ImFusionSuite+0x1f671 [0x56507704d671]
stack dump [33] /lib/x86_64-linux-gnu/libc.so.6__libc_start_main+0xf3 [0x7f4a80a95083]
stack dump [34] ImFusionSuite+0x2001e [0x56507704e01e]
I am on Ubuntu 20 with Academic Installer Version 3.9.0 and ROS1.
I am starting the ROS core outside of ImFusion.
Please let me know whether more info is needed. I can provide the URDF if necessary.
Thank you!
Best,
Felix